

- Support portal
- Evaluation Kits and partner products
u-blox Support
- Product documentation
Documentation
- Investor relations
Investor relations
Tech
|
11 Jun 2021
Bluetooth AoA technology tracks a moving tag in real-time.
")
Released as part of Bluetooth 5.1, Bluetooth direction finding just might be the technology that brings high precision positioning in indoor environments en masse. As its name implies, Bluetooth direction finding makes it possible to detect the direction of a tagged person or thing relative to one or several, typically fixed, anchor points. Its output is a huge improvement compared to the previous solution, which used the received signal strength indicator (RSSI) to deliver a coarse estimate of the distance separating the tag and the anchor, without providing any information on the tag’s relative direction.
Bluetooth direction finding uses angle-of-arrival (AoA) technology to calculate the angle at which the RF signal transmitted by the moving tag hits the anchor. It does so by measuring slight phase differences of the incoming Bluetooth advertising message across the anchor’s multi-antenna array. We tested the technology in our office in Malmö, Sweden, using a Bluetooth 5.1 module connected to an antenna array as the fixed anchor, as well as a moving tag featuring another Bluetooth 5.1 module.
Check out this video to see how it performs:

As you can see in the video, throughout the demonstration the servo, seen in the front, closely tracks the moving tag as it is carried around in the background. The tag, which is made up of a u-blox application board, contains a u-blox NINA-B406 Bluetooth 5.1 low energy module based on the Nordic nRF52833 chipset. It broadcasts Bluetooth messages with a range of roughly ten meters in this particular setup, but that can extend further in other use cases.
The radiofrequency signals carrying the messages are picked up by a u-blox antenna board with a NINA-B411 Bluetooth low energy module featuring a u-blox direction finding software. This antenna board includes five cross-polarized antenna patches that determine the angle of the incoming signal on the horizontal and vertical planes, as well as a cross made up of LEDs to visualize the angle estimation in real-time.
Finally, the antenna board outputs a data stream containing the estimated angle, the received signal strength indicator (RSSI) value, the tag ID, as well as other values. The angle estimates are then used to control servo mounted on a pivotable holder, constantly aiming at the moving tag in real-time.
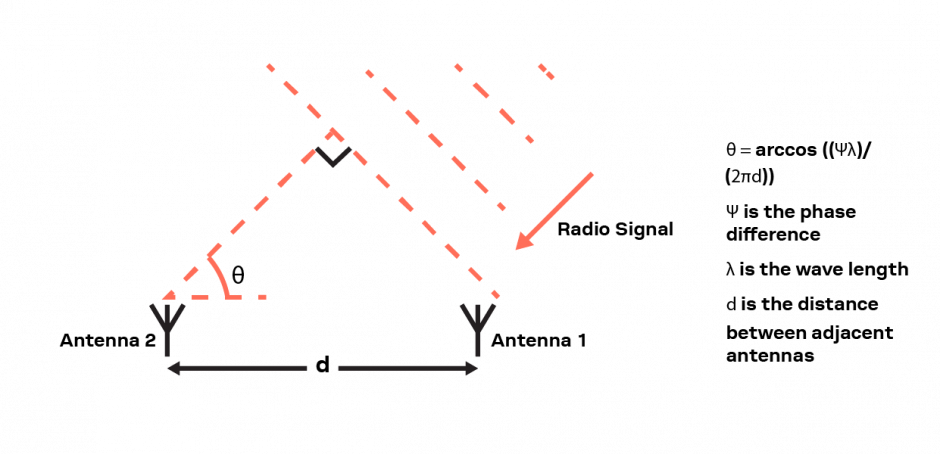
The figure below illustrates how the antenna arrays determine the direction of incoming RF signals using angle-of-arrival (AoA)-based direction finding. The signals transmitted by the mobile tag hit each individual antenna that makes up the anchor’s multi-antenna array with a slight phase shift relative to the rest. Making some assumptions on how the RF signal propagates, the slight phase differences observed at each antenna can be used to calculate its angle of arrival:
Implementing the algorithms required to translate these phase differences into an angle output can present a road bump for developers not experienced in developing time-critical firmware in constrained embedded systems. To simplify develop of direction-finding solutions and speed up time to market, we have developed a wireless connectivity software. It offers developers an easy-to-use command API requiring zero programming to calculate the angle right on the u-blox NINA-B411 module, handling RF data collection and preprocessing, and suppressing multipath components on each individual antenna.
When we started working with Bluetooth direction finding, we basically saw it as an incremental step towards high precision indoor positioning. But as we progressed, we realized that there are countless ways to use direction finding technology itself. It can be used to build a camera that follows a tagged target, simply by mounting a camera onto the servo used in the demo presented in this article. The technology’s ability to determining which side of an anchor a tag and, thus, an asset is located at can be used to develop access control systems for residential, commercial, and industrial buildings. Mounted on vehicles, it can be used to implement collision avoidance systems. And the list goes on...
To learn more about how you can use u-blox solutions to implement Bluetooth direction finding in your next project, please get in touch or fill out a project information form.
Erik Carlberg
Senior Product Manager Short Range Radio at u-blox







