


- Support portal
- Evaluation Kits and partner products
u-blox Support
- Product documentation
Documentation
- Investor relations
Investor relations
Tech
|
09 Feb 2024
Australian automation and positioning technology provider conducts static and kinematic tests

Locating people, animals, or objects on Earth with high precision requires the use of GNSS receivers and the support of network RTK correction services that account for errors caused by the atmosphere, satellite clock drift, and signal delays.
Three standard approaches to correct these errors are Real Time Kinematic (RTK), Precise Point Positioning (PPP) GNSS correction services, and a combination of the two, PPP-RTK. Beyond these, a pairing device such as a survey-grade GNSS receiver or a mass-market smart antenna is also required to enhance positioning accuracy. Combining any of these approaches with one device will optimize the positioning accuracy of the end-use application.
Many GNSS navigation applications require high accuracy. The accuracy of survey-grade GNSS receivers exceeds what mass-market smart antennas can provide. Of course, this comes at a price. Still, several high-precision GNSS navigation applications can do well with the accuracy offered by mass-market smart antennas. Examples include transportation, e-mobility, IoT use cases, and field robotics. Designers aim to equip devices with reliable, high-precision positioning at a reasonable cost.
GNSS users can verify the capabilities of setups by hitting the roads and testing them in real-world situations. Doing so enables them to understand the capabilities of these setups and differentiate them.
Aptella (formerly branded as Position Partners), an Australasian provider of automation and positioning technology solutions, had the opportunity to test the capabilities of network RTK vs PPP-RTK GNSS correction services and present the findings to their client.
We will discuss the findings, but as a first step, let us review how the RTK, PPP, and PPP-RTK approaches operate, the equipment needed, and the participants in this exercise.
The mentioned correction approaches follow different paths. RTK GNSS correction services calculate and correct GNSS errors by comparing satellite signals from one or more reference stations. Any errors detected are then transmitted using IP-based communications, which can be reliable beyond a radius of 30 km from the nearest base station. Network RTK typically requires bi-directional communication between the GNSS receiver and the service, making the solution more challenging to scale. This approach can provide centimeter-level positioning accuracy in seconds.
Precise Point Positioning GNSS correction services operate differently. They broadcast a GNSS error model valid over large geographic regions. Because this service requires only unidirectional communication (IP-based or via satellite L-band), it’s more scalable to multiple users, unlike RTK.
PPP high-precision positioning takes between three minutes and half an hour to provide a position estimate with an accuracy of less than 10 cm. Static applications such as surveying or mapping typically use this solution, but it can be a poor fit for dynamic applications such as unmanned aerial vehicles or mobile robotics.
More recently, both approaches have been combined into what is known as PPP-RTK GNSS correction services (or State Space Representation (SSR) correction services). This combination provides the accuracy of the RTK network and its fast initialization times with the broadcast nature of Precise Point Positioning. Similar to PPP, the approach is based on a model of GNSS errors that has broad geographic validity. Once a GNSS receiver has access to these PPP-RTK correction data through one-way communication, it computes the GNSS receiver position.
Survey-grade receivers are devices typically used for geodetic surveying and mapping applications. They are designed to provide highly accurate and precise positioning information for civil engineering, construction, GIS data, land development, mining, and environmental management.
Today’s modules can access data from multiple satellite constellations and network RTK support. These devices are typically very expensive, costing thousands of dollars each, because they are highly precise, with accuracies ranging from centimeters to millimeters.
Mass-market smart antennas are specialized receiver/antenna-integrated devices designed to receive signals from satellite constellations and GNSS correction services right out of the box. Smart antennas capture and process raw data to determine precise locations. Standalone GNSS antennas don’t have a precision rating, as this depends on the integrated GNSS receiver and correction service to which the antennas are coupled.
While mass-market smart antennas are more affordable than survey-grade GNSS receivers, there is a corresponding performance trade-off, with accuracies ranging from a few centimeters to decimeters.
The following tests used a survey-grade GNSS receiver to verify control coordinates in static mode and compare RTK versus PPP-RTK results in the kinematic mode. The GNSS smart antenna was also employed as a pairing device for these static and kinematic tests.
Aptella is the company that conducted the performance test and presented the results to their client. However, the participation of four other companies was crucial.
AllDayRTK operates Australia's highest-density network of Continuously Operating Reference Stations (CORS). Its network RTK correction services were used to compare with PPP-RTK.
u-blox’s PointPerfect provided the PPP-RTK GNSS correction services used in these tests.
Both correction services were coupled with a survey GNSS receiver, Topcon HiPer VR, and a mass-market smart antenna, the Tallysman TW5790.
In the Australian city of Melbourne, Aptella conducted static and kinematic tests with several objectives in mind:
These tests allowed experts to compare the accuracy of RTK and PPP-RTK GNSS correction services supported by a mass-market Tallysman smart antenna. They were also able to verify the PPP-RTK performance specifications published by u-blox.
First, a survey-grade Topcon HiPer VR GNSS receiver was used to verify the control coordinates in static mode. Once these were obtained, the Tallysman smart antenna took its place.
The table below summarizes representative results from both methods, PPP-RTK and RTK. Horizontal (planar) accuracy is similar for both, while the vertical accuracy is less accurate with PPP-RTK than RTK.
The horizontal accuracy level of RTK and PPP-RTK is in the centimeter range. In contrast, RTK maintains a centimeter range at the vertical accuracy level, but the PPP-RTK correction errors were in the decimeter range.
| GNSS augmentation | Horizontal error (m) | Vertical error (m) | Horizontal 95% (m) | Vertical 95% (m) |
|---|---|---|---|---|
| RTK AllDayRTK | 0.009 | 0.010 | 0.012 | 0.018 |
| PointPerfect PPP-RTK | 0.048 | 0.080 | 0.041 | 0.074 |
Furthermore, the accuracy of the mass market device is within published specifications to meet the 30 cm @ 95% for location (plan) even when obstructed. Still, when measuring heights, these were less accurate than 2D horizontal coordinates. Absolute horizontal location accuracy meets the mass market requirement of 30 cm @ 95%, although RTK is more accurate at a vertical level than PPP-RTK.
On the streets of Melbourne, Aptella experts tested RTK and PPP-RTK corrections operating in different kinematic modes with variable speeds, such as walking under open skies and driving in different environments.
The test setup using an RTK network consisted of AllDayRTK corrections and a survey-grade GNSS receiver. On the other hand, the PPP-RTK test setup was supported by u-blox PointPerfect and the Tallysman smart antenna. The antennas for both setups were mounted on the roof of the vehicle and driven through different routes to encounter various GNSS conditions.
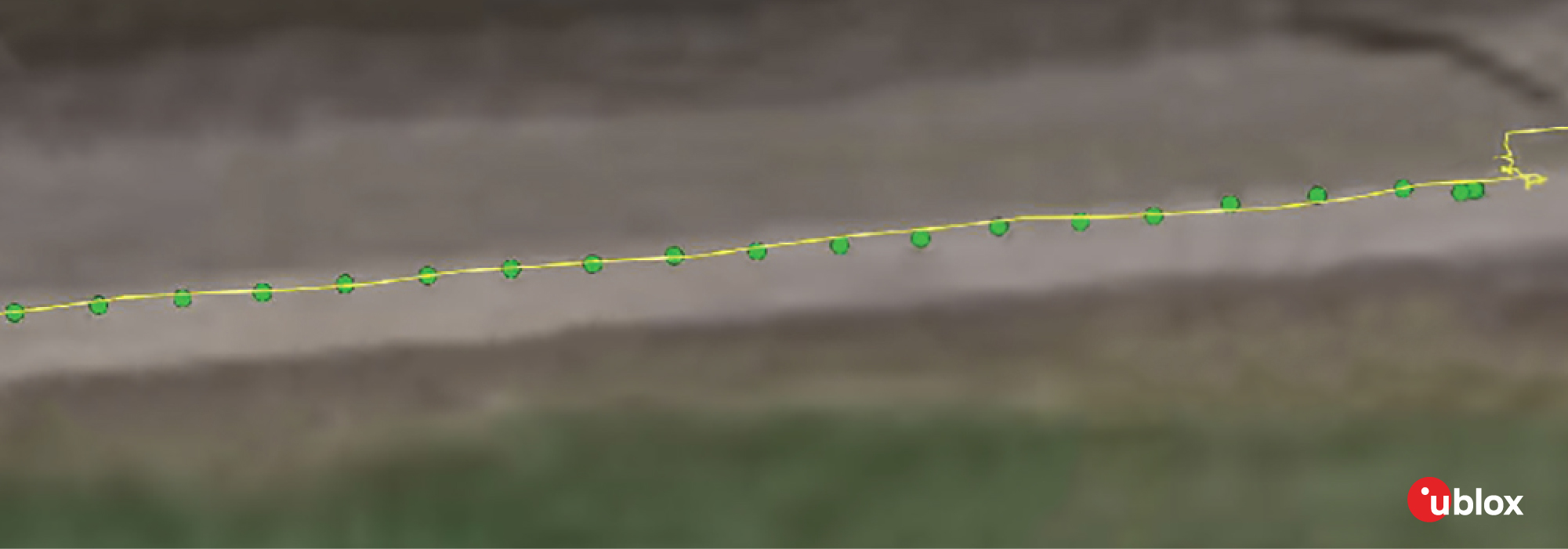
Walking in the open sky: This test involved a walk along the riverbank. Comparing the results, both were similar, proving that PPP-RTK is well-suited for mass-market applications.
On-road driving with varying conditions: This test consisted of driving on Melbourne roads in different conditions, including open skies and partial or total obstructions to GNSS. The route included driving under bridges and areas with multipath effects. Vegetation in the area at the start of the test prevented the smart antenna’s IMU from initializing. No IMU/dead reckoning capability was used during the drive test.
The results obtained while the vehicle moved through a long tunnel under the railroad tracks were of utmost importance. In this situation, the PPP-RTK approach reported a position even in an adverse environment. In addition, PPP-RTK reconverged shortly after RTK.
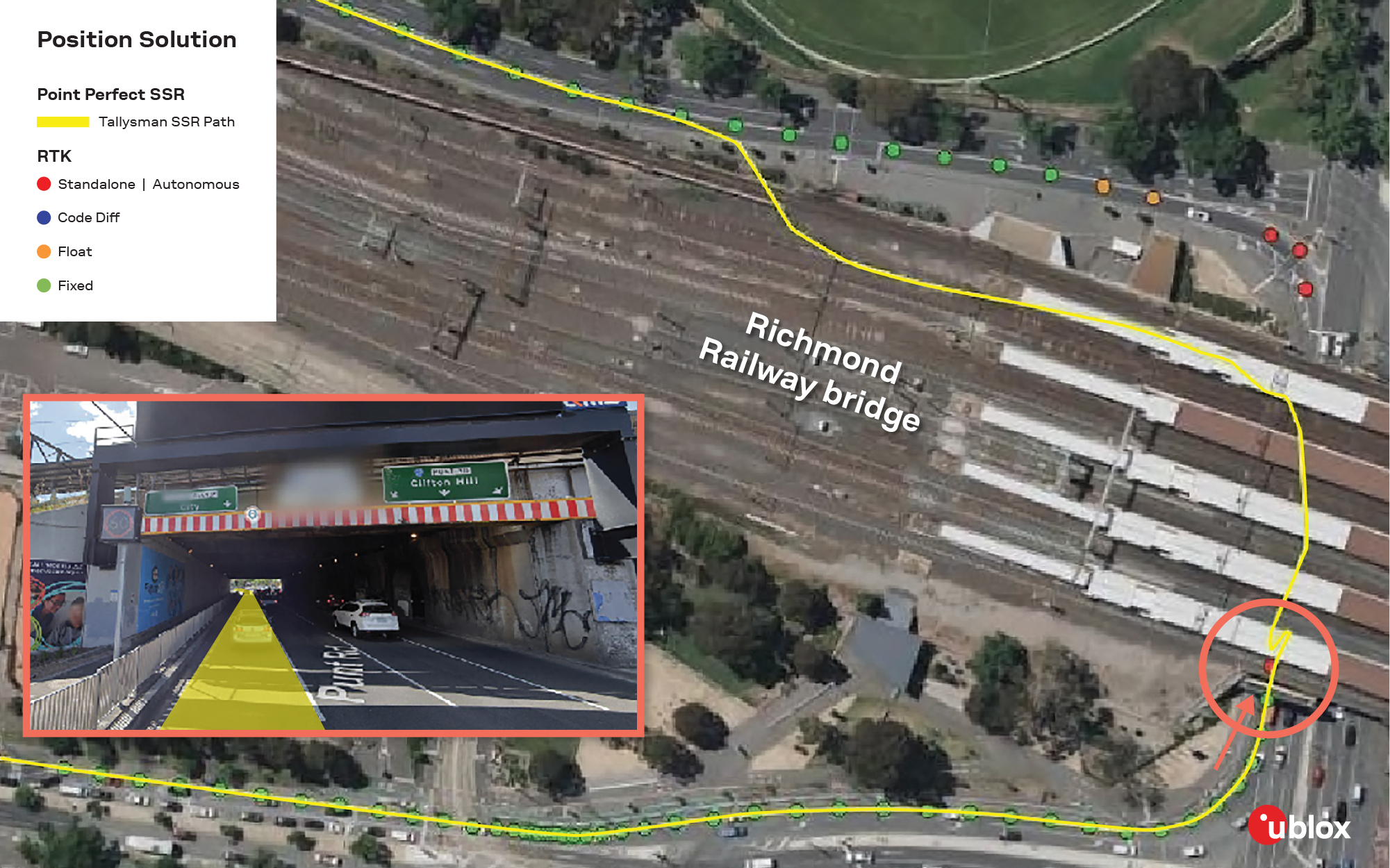
Another revealing result of this second test was that the Tallysman smart antenna didn’t seem to deviate from its path when passing under short bridges.

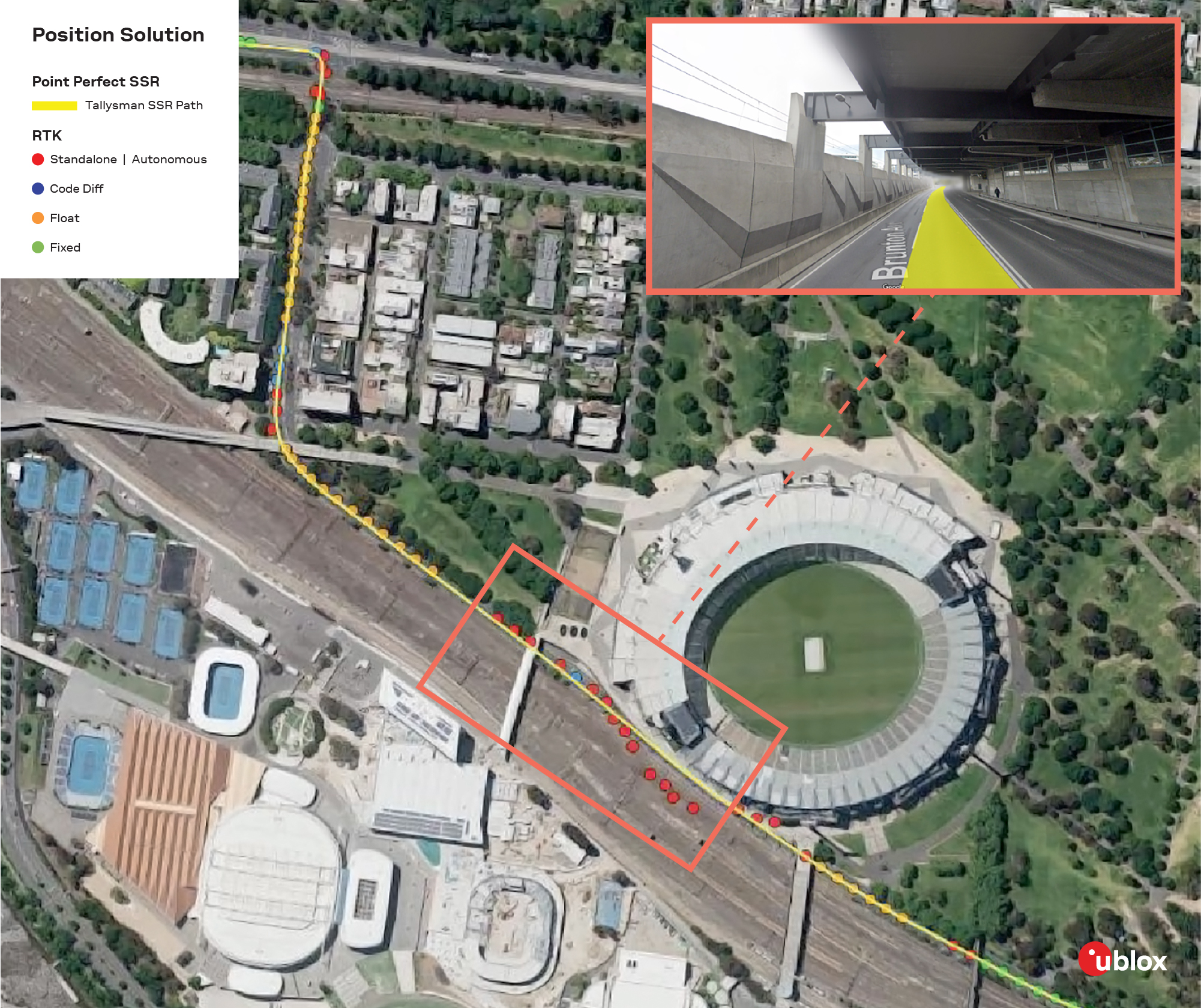
Driving through an outage: The outage test took place in an extended, challenging environment for GNSS. This occurred when the car drove under the pedestrian overpass at the Melbourne Cricket Ground. The PPP-RTK solution maintained the travel trajectory and effectively tracked the route (in yellow). On the other hand, the RTK network solution reported positions off the road and on the railway tracks. In this outage condition, RTK took a long time to reconverge to a fixed solution.
Open-sky driving: The final on-road test was conducted in an open-sky environment where the two setups performed similarly. They provided lane-level accuracy and suitability for mass-market applications. However, ground truthing and further testing are required to fully evaluate the accuracy and reliability of PPP-RTK in these conditions.

The five static and dynamic tests conducted by Aptella were instrumental in assessing the effectiveness of different setups to determine the position of stationary and moving entities.
As mentioned above, survey-grade devices are costly although highly accurate. A combination of survey-grade GNSS receiver and network RTK correction service is recommended in geodetic surveying use cases that require high height accuracy.
Conversely, mass-market smart antenna devices using PPP-RTK corrections are less expensive but also less accurate. Nevertheless, they are well suited for static applications that don’t require GNSS heights at survey grade.
For many high-precision navigation applications, such as transportation, e-mobility, and mobile robotics, PPP-RTK is sufficient to achieve the level of performance these end applications require. The relative affordability of smart antenna devices, combined with PPP-RTK's ability to broadcast a single stream of corrections to all endpoints, makes it easier to scale from a few prototypes to large fleets of mobile IoT devices.
Patty Felts
Product Marketing Manager, Product Center Services

