


ZED-F9P module
u-blox F9 high precision GNSS module
Insights
|
24 Nov 2021
Knowing when positioning data is unreliable improves service efficiency and quality.

Autonomous robots, cars, and all other GPS-enabled applications all have one thing in common: they never know precisely where they are. That isn’t to say that they are clueless as to their location. There is simply no way for them to know exactly how accurate the position output they get from their global navigation satellite system (GNSS) receiver is.
Standard GNSS receivers are accurate to within a few meters. Multi-constellation, multi-frequency solutions with dead reckoning can reliably achieve accuracies down to about one meter. And high precision receivers can use GNSS correction data to bring accuracies down to just a few centimeters.
In each case, however, the real-time position error is unavailable to the end device. So far, the best guess has been the accuracy estimate, calculated a variety of inputs such as the quality of the incoming satellite signals and other conditions experienced by the GNSS receiver. While this estimate does help narrow down the likely location of the GNSS receiver to a smaller circle, it leaves open a gaping door for outliers: accuracy estimates based on a modified Gaussian distribution typically only offer 68% confidence.
GNSS protection level takes the idea of an accuracy estimate one step further. It uniquely offers an empirically validated real-time estimate of the maximum position error with 95 percent confidence. In other words, it increases the size of the circle likely to contain the GNSS receiver’s actual position, but all but closes the door on outliers. Put in numbers: the actual position error of the GNSS receiver operating with a 1 Hz output rate will exceed the protection level no more than 180 times per hour (for 3600 reported positions).
To be clear, the protection level is not a static value assigned to a GNSS receiver. Like the accuracy estimate, it constantly evolves based information gleaned from the incoming satellite signals. But while the actual position error often exceeds the accuracy estimate, it is extremely rare for it to exceed the protection level. For applications accustomed to dealing in probabilities and estimates, the protection level offers an unusual level of certainty, making it valuable for any number of GNSS-based use cases.
Consider robotic lawnmowers. These slow-moving devices typically follow random trajectory across a plot of land delimited by underground boundary wires, using sensors to keep them from hitting obstacles. It’s an approach that has worked quite well in the past especially in settings that do not require the perfect stripe patterns we know from football and soccer fields are not a requirement. All the lawnmowers need to trim every last blade of grass is enough time.
But with the introduction of high precision GNSS technology, the next generation of robotic lawnmowers will, instead, be able to adopt a more systematic and efficient approach, using real-time path planning algorithms based on a digital map. There is, however, a condition: the robotic lawnmower needs to be capable of reliably avoiding exclusion zones marked on the map, such as flower beds or other off-limit areas such as neighboring property.
GPS protection level gives the robotic lawnmower a reliable metric, using which it can adapt its trajectory in real-time to the quality of the GNSS receiver’s position output.
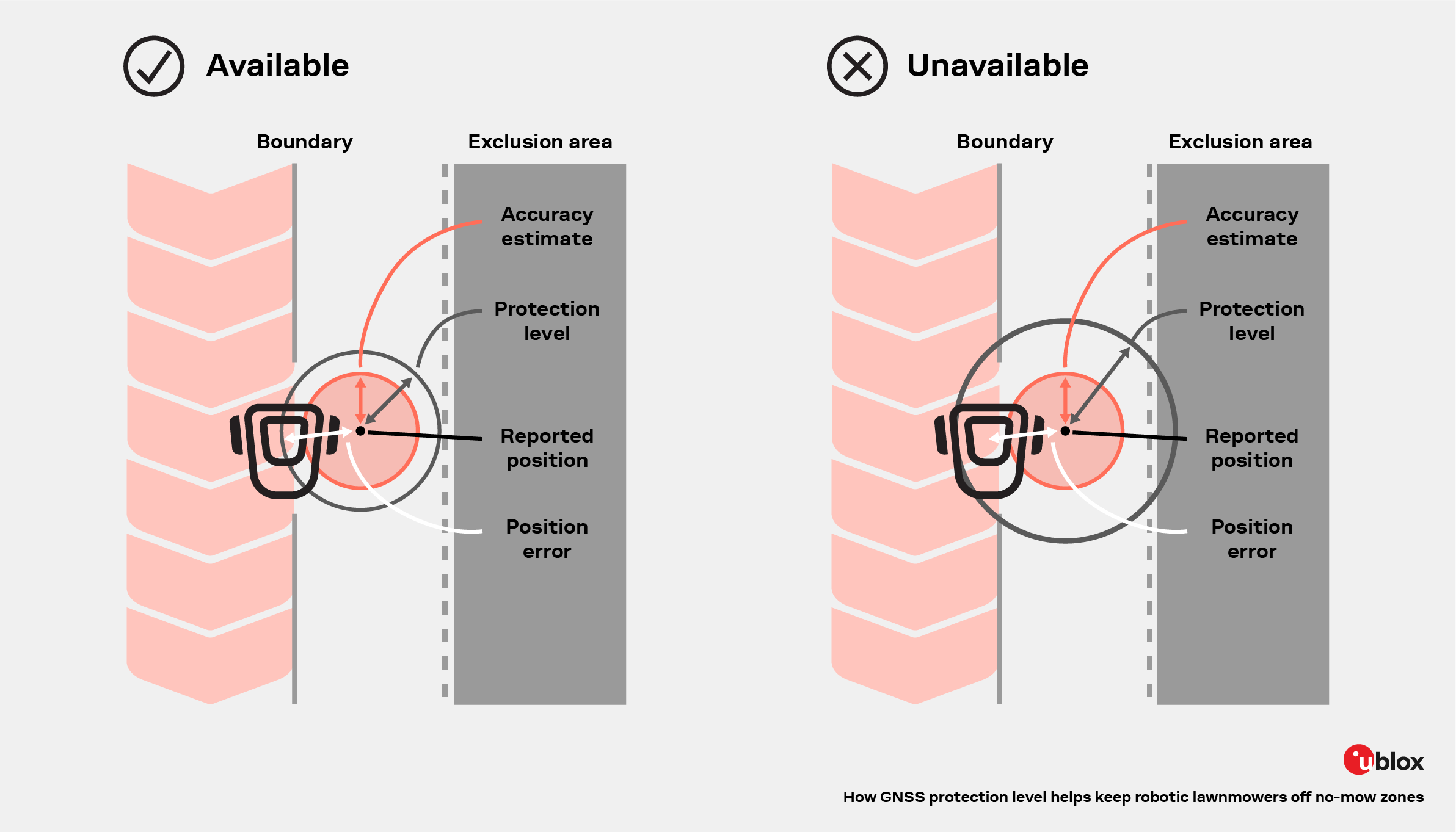
As illustrated in the image above, the robotic lawnmower operates according to plan as long as the distance between the reported position and the exclusion area exceeds the protection level. When the protection level increases to the point that it extends into the exclusion area, or if no valid protection level value is available, service is interrupted. In this case, the lawnmower can, for example, retrace its steps back to the most recent trusted position.
Ultimately, GPS protection level increases quality of service by letting the lawnmower get closer to exclusion area while minimizing the risk of entering it.
Robotic lawnmowers are by no means the only application to benefit from GPS protection level. Basically, any application that relies on GPS-based positioning information can benefit from a highly reliable upper bound on the position error. Next, we briefly look at four other use cases.




GPS protection level is now available on the ZED-F9P-04B high precision GNSS module. Designed for seamless integration with the NEO-D9C and NEO-D9S GNSS correction service receivers, the module offers customers unprecedented flexibility in assembling cost-effective, scalable solutions for robotic lawnmowers, unmanned autonomous vehicles (UAV), and semi-automated or fully automated machinery.
Head over to u-blox.com to learn more about protection level, the upgraded ZED-F9P high precision GNSS receiver, our new GNSS correction service receivers, and more.
Alex Ngi
Product Manager for Industrial Navigation and Robotics, Product Center Positioning, u-blox

