

Technology
|
15 Dec 2020
蓝牙室内定位
蓝牙 5.1 引入的蓝牙寻向功能可让用户在室内以米级精度定位资产、人员和其他任何物体,为新的室内定位用例和商业模式铺平了道路。
早在蓝牙 5.1 发布之前,蓝牙低功耗技术就已成为室内定位应用的领先解决方案。基本方法包括使用蓝牙接收机(例如智能手机中的蓝牙接收机)测量固定信标发出的蓝牙信号的信号强度(RSSI)。另外,固定锚点也可以测量移动设备(也称为标签)发射的蓝牙信号的 RSSI。这些基于 RSSI 的方法通常能达到几米的精度水平,并已被用于确定资产或人员是否在房间内。
蓝牙技术联盟认识到人们对更多精确室内定位解决方案的需求日益增长,于 2019 年 1 月发布了蓝牙 5.1,并将蓝牙寻向功能作为其主要功能。 利用多天线锚点星座,蓝牙寻向功能可用于三角定位移动设备或标签在覆盖室内环境中的精确位置。
基于蓝牙 5.1 的室内定位可达到米级精度。符合蓝牙技术联盟(Bluetooth SIG)定义的标准级,标准可确保设备使用的信息��格式与各供应商兼容。而蓝牙在面向大众市场和利基应用的通信设备中的普及,有望促进室内定位解决方案的应用。
"跟着我 "寻路演示

摄像头根据移动标签射频信号到达锚点的角跟踪移动标签。
蓝牙 5.1 之前的蓝牙定位
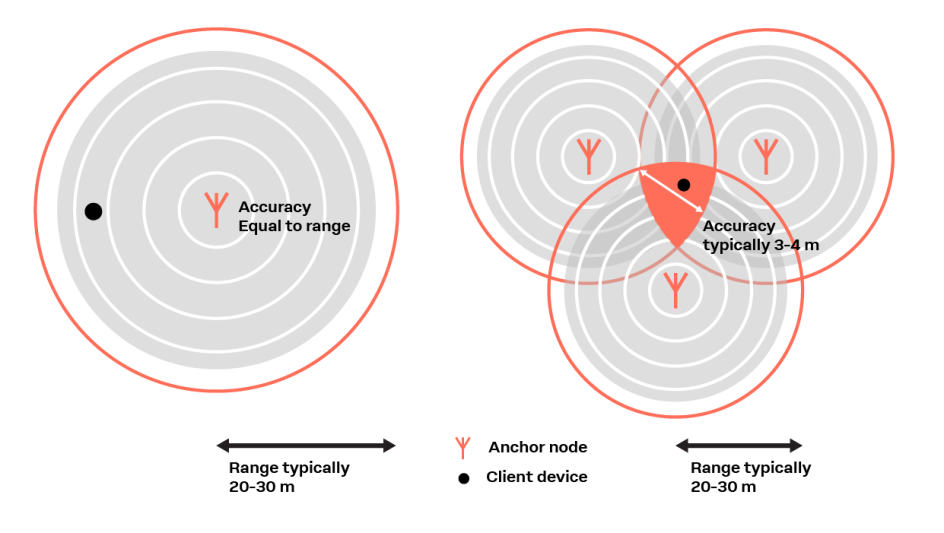
下面的插图展示了蓝牙 5.1 之前的蓝牙低功耗技术在室内环境中的普遍应用。其中包括工业、商业和零售场所,以及博物馆等文化场所。左图中,一个携带蓝牙设备的客户位于房间内,房间内有一个蓝牙锚点,可接收来自移动设备的广告信息。右图中,房间内装有多个锚点。这两种方法都利用了 RSSI(接收信号强度的测量值)。
在只有一个蓝牙锚节点的情况下,客户端可以被大致定位在距离锚点一定距离的范围内。这种方法已被用于实施近距离解决方案,以检测客户端是否已进入目标区域,如购物中心或博物馆。当存在多个蓝牙锚点时,可以使用复杂的算法(如三坐标法)来更准确地确定客户端与锚点的相对定位。
具有寻向功能的蓝牙定位
如前言所述,蓝牙寻向功能可确定移动客户端与一个或多个固定锚点之间无线电信号的传播方向。蓝牙开发了两种解决方案架构,一种基于无线电信号到达锚点的到达角(AoA),另一种基于离去角(AoD)。
寻向功能--到达角(AoA)
在 AoA 的情况下,移动资产配备的标签会发射蓝牙寻向功能信号,其中包括一个恒定音调扩展包(CTE)。在这种情况下,天线阵列所做的测量是利用基于网络的引擎来确定传入信号的角度。如下图所示,移动客户端传输的信号到达组成锚点多天线阵列的各个天线时,相对于其他天线会有轻微的相位偏移。假设信号传播的是平面波,那么在每个天线上观察到的轻微相位差就可以用来计算信号的到达角。
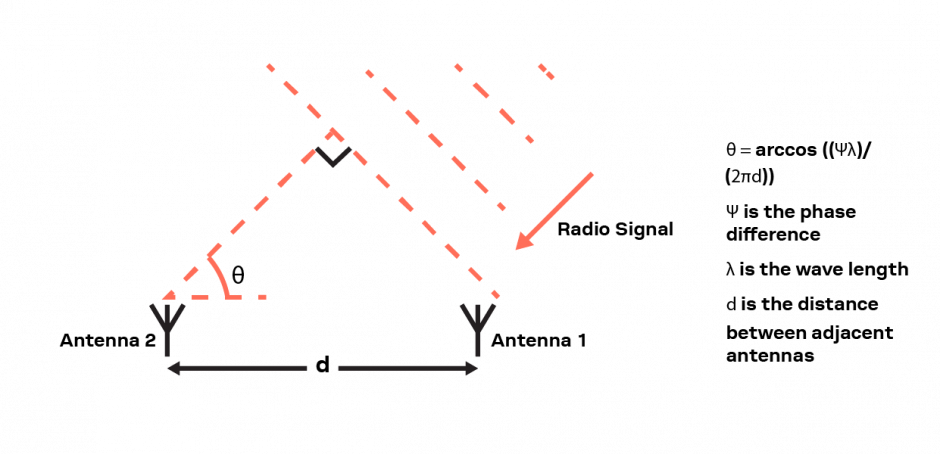
利用相位差推导到达角。改编自蓝牙技术联盟
AoA 可用于实现实时定位服务 (RTLS)或跟踪用例。
寻向功能--离去角(AoD)
在 AoD 的情况下,移动客户端接收由一个或多个天线阵列传输的蓝牙寻向功能信号。在这种用例|使用场景|场景中,移动客户端使用对输入信号的测量来计算信号离开天线阵列的方向。利用 AoD 技术,锚点天线阵列的每个元素所传输的寻向功能信号在到达客户端时,相对于其他元素会有轻微的相位差。有了天线阵列的几何信��息,客户端就可以利用测得的相位差计算出信号离开天线阵列的离去角。
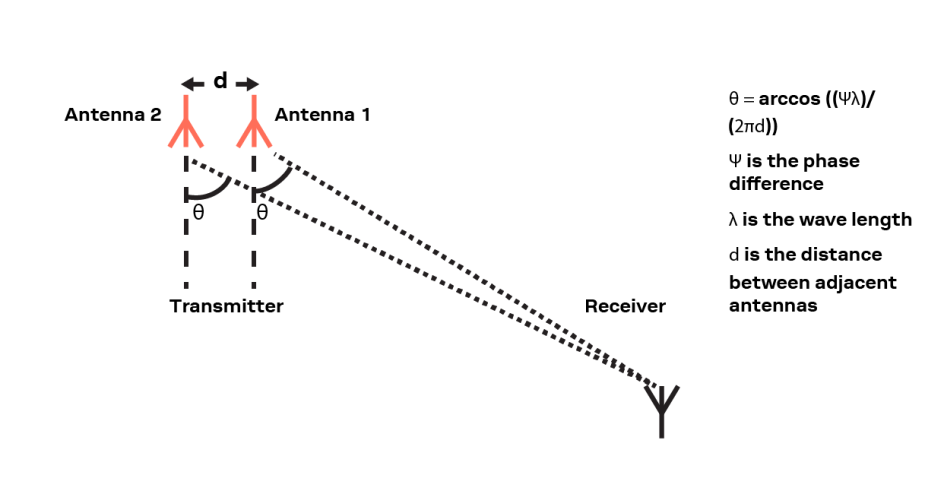
利用相位差得出离去角。改编自蓝牙技术联盟
AoD 可用于实现导航和寻路用例。
使用单锚寻向功能
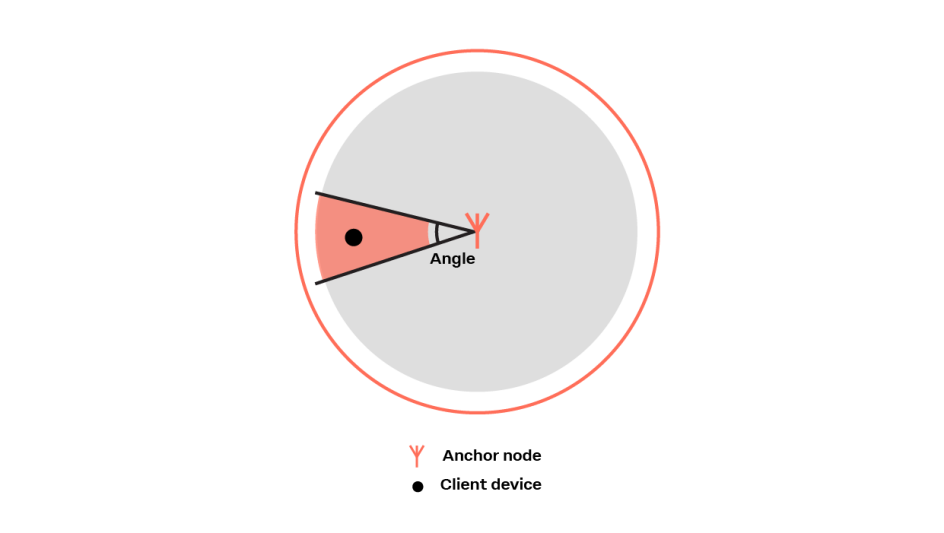
室内定位装置可使用具有多天线阵列功能的单个锚点。例如,这种设置可用于确定移动客户端位于固定锚节点的哪一侧。
使用多个锚点的寻向功能
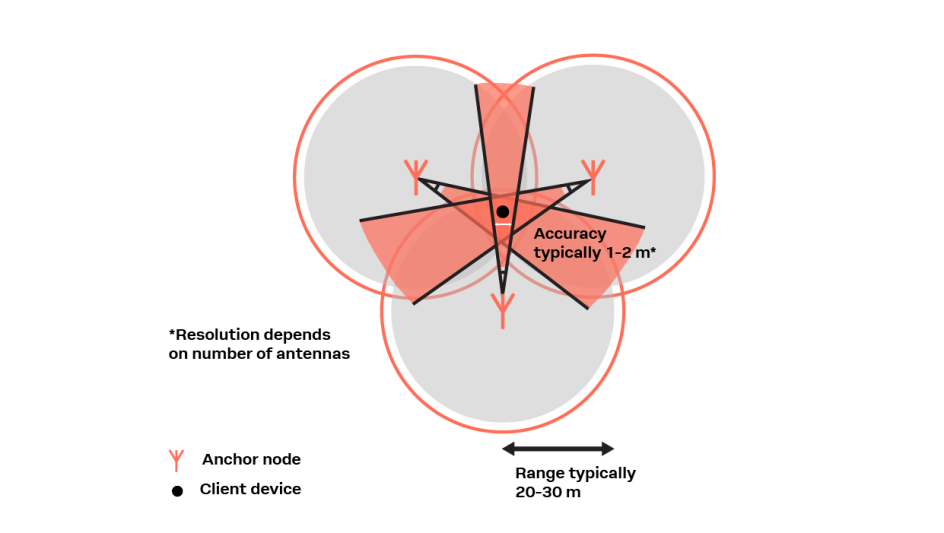
多天线阵列的多个静态锚点可用于满足对精度要求更高的用例。在这种情况下,可以通过三角测量法精确计算出资产的位置,即利用多个锚点传入或传出信号的角度,确定它们的交点。
室内定位演示
定位引擎利用移动标签射频信号到达四个固定锚点的角,实时计算出移动设备的精确单点定位,并显示在屏幕上。
使用案例
室内定位解决方案适用于各种用例,包括物流、医疗保健、制造、零售、仓库和智能楼宇。

通过角度检测,可以确定人员位于电梯的哪一侧。建筑物的入口控制系统可以利用这一信息,只在人员直接靠近电梯门时才打开电梯门,从而提高安全性。

在工厂环境中,室内定位和跟踪可帮助连续定位和跟踪多个资产,促进自动化,提高效率。
u-blox 解决方案
最新��的 u-blox 蓝牙模块支持蓝牙 5.1 和寻向功能,包括

NORA-B20 series (open CPU)
Stand-alone Bluetooth 5.4 Low Energy modules

ANT-B10 antenna board
Bluetooth Low Energy 5.1 antenna board

XPLR-AOA-3
Direction finding explorer kit with ANT-B10 antenna board and EVB-ANT-1 development platform

ANT-B11 antenna board
Bluetooth 5.1 direction-finding antenna board

NINA-B41 系列 (u-connect)
stand-alone 蓝牙 5.1 低功耗模块

u-locateEmbed
<p>(上一页 u-connectLocate)</p>

XPLR-AOA-1 套件
带有 NINA-B4 蓝牙 5.1 模块的寻向功能探索套件

XPLR-AOA-2 套件
带有 NINA-B4 蓝牙 5.1 模块的室内定位探索套件