

Technology
|
05 Nov 2020
Protection level
Critical applications need to know how much faith they can place in their GNSS receiver’s output at any given moment. Computed by the GNSS receiver in real-time, the protection level quantifies the reliability of the position information, improving data quality and keeping people and assets safe.
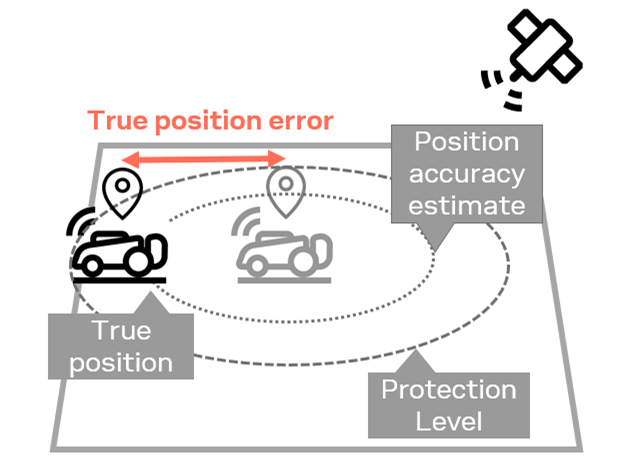
A GNSS receiver’s protection level describes the maximum likely position error to a specified degree of confidence. If, for example, a GNSS receiver determines its position with a 95% protection level of one meter, there is only a 5% chance that reported position is more than one meter away from its true position. Like the accuracy of a GNSS receiver’s position information, the protection level constantly fluctuates, influenced by all the error sources that commonly affect GNSS solutions.
By continuously offering an upper bound on a GNSS receiver’s expected error, the protection level lets applications adapt their performance to the quality of the information they receive and discard values that are deemed unreliable.
The image above illustrates the protection level at work. The autonomous lawnmower’s true position is illustrated in black, while its measured position is represented in grey. The receiver constantly computes a position accuracy estimate, depicted as a dotted circle. The protection level, represented as the dashed circle around the reported positions, provides an improved position accuracy estimate, delimiting the area on which the GNSS receiver’s true position is to be found with high confidence.
Robot navigation
In robot navigation, the protection level helps ensure that the device, e.g. an autonomous lawnmower, stays within a geofenced area (and off the neighbor’s flowerbed).
If the protection level becomes too large, the robot can adapt its behavior to account for the poor quality of its position estimate and slow down or move backwards to a “safe” position. If the protection level value fails to compute, the device can stop and wait for environmental error sources such as RF interference or adverse atmospheric conditions to subside to or go back until a valid protection level value is available.
Drones and UAVs
In the case of drones and other unmanned aerial vehicles, the protection level can be used to determine whether the GNSS reading is reliable enough for delicate maneuvers such as landing and to robustly enforce no-fly zones.
If the protection level exceeds a threshold value, the drone might return to a previous known position. It might only land if the protection level value is below the threshold and, if need be, hover in place until the protection level indicates that the quality of the position estimate has improved.
Cars, e-scooters
Cars, e-scooters, and other connected mobility solutions can use the protection level to assess the quality of essential positioning data that they report to their servers.
Parked vehicles might, for example, only report their positions when the protection level is below a given limit to make it easier for staff and customers to locate them.
From basic protection levels to functional safety
Requirements on the protection level will vary from application to application, largely depending on the desired reliability of the GNSS receiver and on the criticality of its position estimate. An asset tracking solution might be well-served with a GNSS receiver that is accurate to 2 meters with a 95% protection level of 3.5 meters. A self-driving car, on the other hand, might require a much stricter 99.9999% protection level.
While basic protection levels add value to many consumer and industrial applications, critical automotive applications set much more stringent requirements on the protection level to achieve “functional safety.” Automotive functional safety is defined in the ISO 26262 standard.



